Developed a new integrated application for ABB’s offline programming software “RobotStudio.”
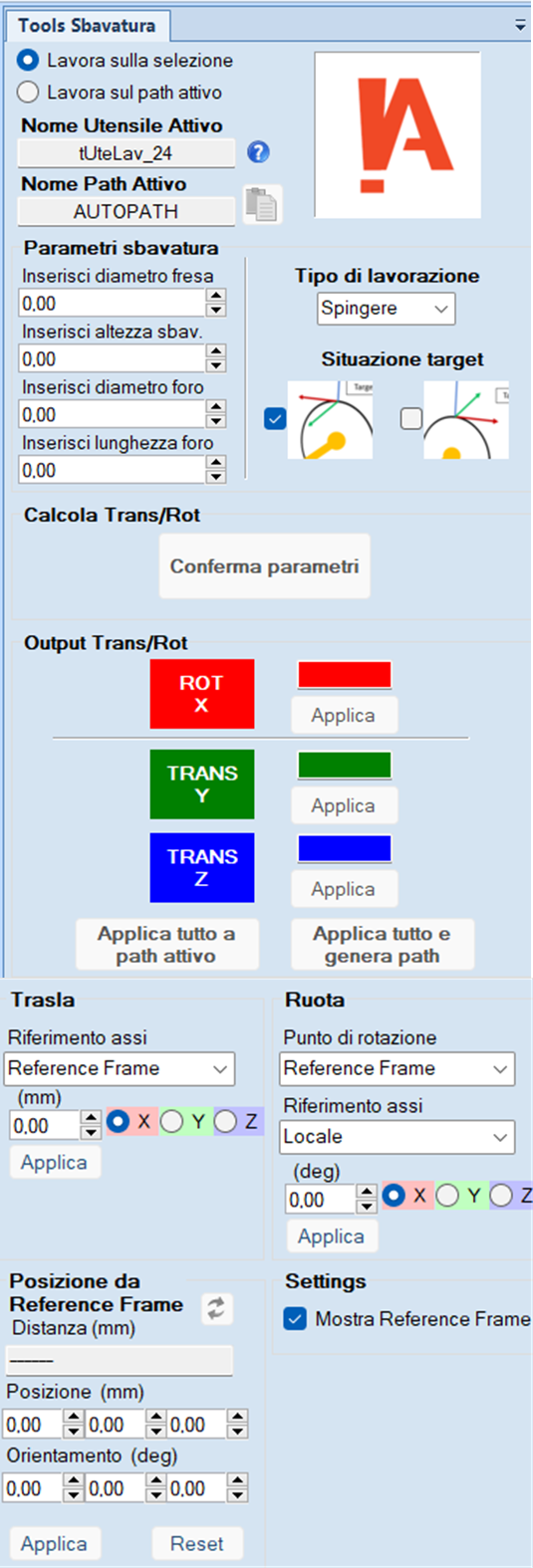
This is an application that is integrated with existing software (Robotstudio) to enrich its capabilities and make programming more suitable for the user’s varied needs:
- Speed in creating complex trajectories;
- Flexibility in parameterizing the created paths;
- Rapidity in changing deburring parameters on profiles;
- Rapidity in editing the created paths.
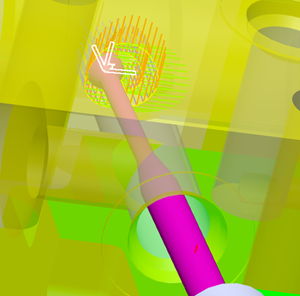
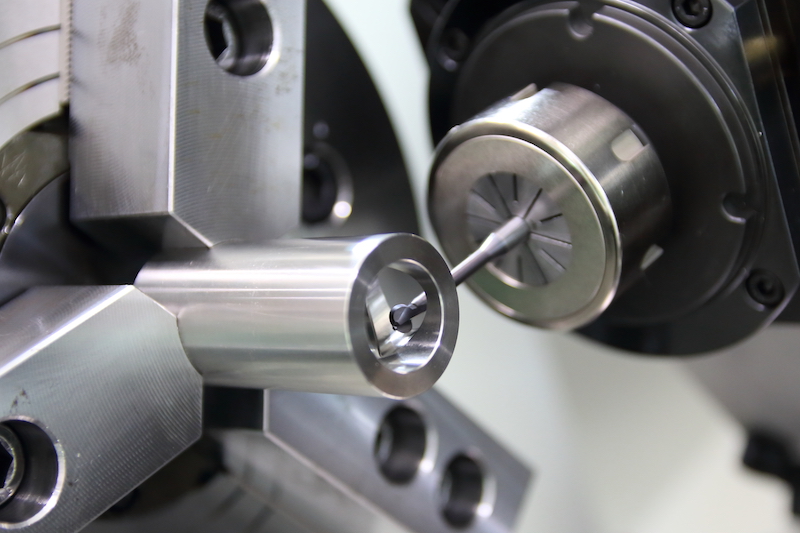
In this specific case, the application was made to meet the needs of those who program offline and have to work with difficult trajectories such as deburring a hole inside a deep cavity, where there is a risk along the trajectory, of deburring badly and not being able to keep the shank of the cutter passing through the center of the cavity.
The application therefore helps operators create specific trajectories along holes or cavities to be deburred. By entering parameters into an interface, accurate calculation of the roto/translation to be applied to targets distributed around the perimeter of the hole is performed to ensure that the tool (cutter) always passes through the center of the hole, avoiding collisions and damage to the hole.